Systematic Conservation Planning
The design of reserve networks has been of central interest to conservation biologists from the outset. The core elements of effective design are now well established under the rubric of systematic conservation planning (Margules and Pressey 2000; Kukkala and Moilanen 2013). Systematic conservation planning is a form of structured decision making adapted to the identification of optimal reserve designs. We will examine each step in turn, leaving the refinements needed to accommodate climate change to Chapter 9. A working example is provided in Case Study 6.
Decision Framing
Most protected area initiatives on public lands involve some form of government process. The government has ultimate responsibility for land management and holds the authority for designating new reserves.
As the final decision maker, the government is normally responsible for framing the decision. The planning area must be identified, the purpose clarified, the core stakeholders selected, the level of public consultation described, and the amount of financial and technical support established. Fixed constraints, such as exclusion areas, also need to be defined. External parties will often seek to influence the framing process, particularly as it relates to objectives, transparency, and stakeholder involvement in decision making.
Parks Canada is the lead agency for protected area planning at the federal level. At the provincial level, protected area initiatives are often part of broad land-use planning programs that involve multiple ministries. These programs are typically overseen by the lead agency responsible for land management, rather than the provincial parks department.
Protected area planning is also undertaken independently by conservation organizations and conservation scientists. These initiatives help to identify conservation priorities and are important in setting the political agenda. However, these organizations lack the authority to establish protected areas on public lands. Nor can they provide an appropriate forum for social decision making. To be implemented, their proposals must eventually be funnelled through a government-run process. Unfortunately, many proposals languish because no linkage is ever made (Knight et al. 2008).
Protected area initiatives on private lands follow a different process. Efforts are typically led by conservation organizations, rather than the government, and they entail direct negotiations between conservationists and landowners. We will discuss the particulars of conservation planning on private lands later in the chapter, in the context of habitat protection in the Agricultural South.
Selecting Biodiversity Surrogates
If a reserve network is to support all elements of biodiversity, then all elements need to be represented in the system. The problem is, we know very little about the distribution and habitat needs of most species. Moreover, there are far too many species to work with individually. Therefore, most conservation planning initiatives achieve representation of biodiversity indirectly, using surrogates (Sarkar et al. 2005). The idea is to select a manageable set of well-described biodiversity components and have them stand in for the other elements.
A common method of selecting biodiversity surrogates is the coarse-filter approach (Hunter et al. 1988). Rather than working with individual species, the coarse-filter approach seeks to identify and represent the major ecosystem types within a planning region. The assumption is that, by representing all major ecosystem types, the habitats of most species will be represented as well. Moreover, ecosystems are a component of biodiversity that merits representation in its own right (Margules et al. 2002).
In Canada, several ecosystem classifications have been developed to support coarse-filter planning. A prominent example is the National Ecological Framework (Marshall et al. 1999), which is a hierarchical ecosystem classification system based on landforms, soils, climate, and dominant vegetation, among other attributes (Fig. 1.3). Several provinces have developed their own systems of ecological classification at finer scales, harmonized to a greater or lesser degree with the national system. These ecosystem classification schemes have served as the foundation for many government-led protected area planning initiatives in recent years, at both the federal and provincial levels (Lemieux et al. 2010).
Another approach to achieving broad representation is to use umbrella species as biodiversity surrogates (Fig. 8.5). These species have large area requirements; therefore, providing adequate protection for them ensures that many other species are protected as well. However, this is not a systematic approach and it does not ensure comprehensive representation in the way the coarse-filter approach does (Higgins et al. 2004). The benefit of using umbrella species is that they are usually well known and can generate public support for protection. For example, linking habitat protection to the needs of grizzly bears was critical to the establishment of the Great Bear Rainforest in BC.
 |
Fig. 8.5. Species with large home ranges, such as the grizzly bear, are sometimes used as biodiversity surrogates in conservation planning initiatives. Such species often have high public appeal and tend to boost support for protection. However, this approach does not provide systematic representation of all habitat types. Credit: J. Frank. |
A limitation of using biodiversity surrogates for conservation planning is that species with unique habitat requirements may be overlooked (Mac Nally et al. 2002; Stewart et al. 2018). These species are often referred to as fine-filter species, indicating that they have slipped through the mesh of the metaphorical coarse filter and require specialized attention. The habitat needs of these species must be addressed on an individual basis (i.e., a fine-filter approach) rather than through a surrogate approach (Hunter et al. 1988). In practice, this is often difficult to do because many fine-filter species are rare and difficult to study. In many cases, information about their habitat needs is rudimentary.
Most conservation planning initiatives also include species of social importance. These are not true fine-filter species, in that they are not distinguished by unique habitat requirements, but they tend to be treated as such in practice. A better term for them is focal species. In principle, the inclusion of focal species is redundant, since their habitats should be represented through the coarse-filter approach. Nevertheless, stakeholders often want to have species of special significance directly represented to provide assurance that their habitat needs are indeed being addressed.
The choices we make about which surrogates to use as coarse- and fine-filter elements provide an operational definition of biodiversity (Sarkar et al. 2006). There are no generic standards to guide these choices, and in practice much depends on data availability and the knowledge and biases of the individuals involved in the planning processes (see Case Study 6). This is one reason why protected area planning initiatives differ so much from one to the next.
Design Objectives
The purpose of the reserve design process is to determine the optimal configuration of reserves for a given protection target. Several design attributes contribute to the effectiveness of reserves and must be taken into account. The optimal configuration is that which scores highest in terms of overall effectiveness. What makes this determination challenging is that trade-offs exist among many of the design attributes.
A fundamental design objective is to represent all components of biodiversity within the network. Protected areas only benefit the biodiversity elements that are included in the system. Representation objectives are usually expressed as minimum area targets for each of the selected biodiversity surrogates and fine-filter elements.
Consideration must also be given to design attributes related to ecological function (Rothley 2006). Reserves are not like stamp collections, where representation is an end in itself. Reserves exist to maintain biodiversity, and so individual reserves must be able to provide effective protection for the species they hold (Rouget et al. 2003).
One of the main functional attributes is the size of individual reserves. Ideally, reserves should be large enough to maintain natural ecological processes, including the interplay between natural disturbance and succession (Leroux et al. 2007). In forested areas where large fires are the major disturbance agent, the minimum reserve size for maintaining dynamic processes has been estimated to be over 4,000 km2 (Leroux et al. 2007). Redundancy is also desirable because large natural disturbances can result in catastrophic losses within individual reserves.
For focal species, a reserve should ideally be large enough to independently support a viable population. For large mammals, this may require a reserve size of several thousand square kilometres (Gurd et al. 2001).
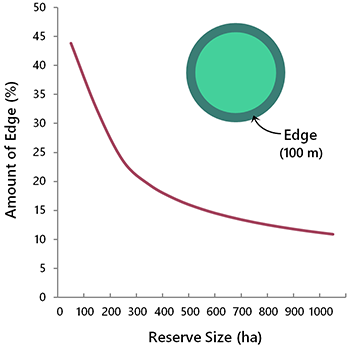
Reserves should also have a large interior to edge ratio, to minimize the impact of anthropogenic disturbances occurring in the surrounding working landscape (Woodroffe and Ginsberg 1998). Edge effects are of greatest concern in small reserves because the amount of edge habitat becomes proportionately greater as reserve size decreases (Fig. 8.6). Shape is also important, in that round reserves have proportionately less edge habitat than elongated reserves of the same size.
Another important factor in reserve design is connectivity. Reserve configurations that minimize the distance between reserves, incorporate natural movement corridors, maintain hydrological connectivity, and build on existing reserves are desirable (Rouget et al. 2003). Such designs support gene flow, facilitate species recovery after a major disturbance, and help species accommodate to climatic change.
The level of pre-existing disturbance is also a design consideration. Reserve designs that achieve representation objectives while avoiding disturbed areas as much as possible are generally favoured because ecological integrity is assured and comes at no cost.
Another design consideration is the level of threat. Areas with a high likelihood of future development are a priority for protection because they will benefit the most. Remote areas with a low likelihood of development are a lower priority, since protecting these areas will make less of a difference to biodiversity outcomes. That said, remote areas rarely remain free from development indefinitely; development just proceeds at a slower pace.
Finally, the reserve design process should seek to minimize conflicts with other land-use objectives. The rationale here is that a prospective reserve will provide no conservation benefit at all if resource conflicts preclude its establishment.
Generating Design Options
Modern conservation planning initiatives generally use planning software to generate reserve design options for consideration. Several software packages are available, including Marxan (Game and Grantham 2008), C-Plan (Pressey et al. 2005), and Zonation (Moilanen et al. 2014), among others.
To apply planning software, the planning area must be subdivided into discrete cells referred to as “planning units.” These serve as the units of selection. The composition of each cell is tabulated to establish its contribution to the representation of each biodiversity element. Other attributes, such as intactness, level of threat, and amount of conflict with resource development are usually tabulated as well, permitting their inclusion in the selection process.
Box 8.2. Planning Unit Options
Several options are available for defining planning units. The most common choice is a grid of hexagons or squares, with a cell size of 1,000 ha or less. The benefit of using a fine-scale grid is that it provides maximum flexibility for assembling efficient reserve designs.
A less common alternative is to use watersheds or other ecological units as planning units. The benefit is that each planning unit is ecologically meaningful. The limitation is that the planning units tend to be large, reducing flexibility. This approach is best suited for planning at very broad scales (e.g., national scale).
A final option is to use administrative units, such as townships, as planning units. This approach may be used if key datasets have been organized by administrative unit.
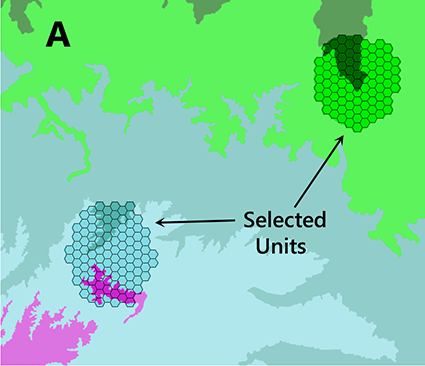
When planning software is run—using Marxan as an example—it assembles reserves by adding one planning unit at a time until all biodiversity elements have been represented to the desired level (Fig. 8.7A). The selection of planning units is guided by an optimization algorithm. The program seeks to achieve representation targets while simultaneously meeting other design objectives. For example, the program can be set to give priority to cells with a high level of intactness or low resource conflict, while still achieving representation targets. The average size of reserves can be increased by favouring planning units that are adjacent to previously selected cells. Cells that contain biodiversity elements not found elsewhere are said to have high irreplaceability, and they tend to be consistently selected. Cells within existing reserves are incorporated automatically, and their contribution to representation is fully accounted for.
The planning units selected in a given model run constitute a potential reserve design. Usually, many alternative designs are possible because the representation targets can be achieved using different combinations of cells. The full spectrum of alternatives can be explored by running the planning program repeatedly. By pooling the results over hundreds of runs it is possible to identify planning units that represent a high priority for protection (Fig. 8.7B).
 |
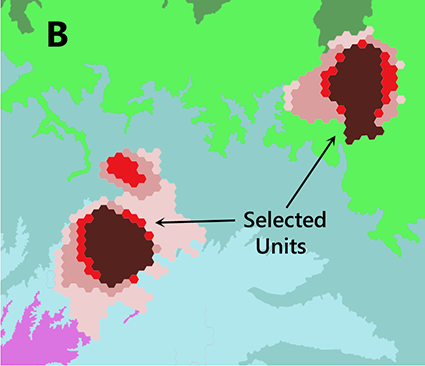 |
| Fig. 8.7. An example of the type of output provided by Marxan, adapted from Case Study 6. Map A illustrates the planning units selected in a single model run, overlaid on a map of major ecosystem types. Map B illustrates the summarized output from 100 model runs, each of which varies slightly. Darker shades of red indicate a higher frequency of selection. Each hexagonal planning unit is 500 ha. | |
Connectivity among reserves is difficult to incorporate in reserve planning software and so it is usually addressed manually. What makes connectivity challenging is that priorities for connectivity do not become apparent until after the location of core reserves has been established. There are also decisions about the length and width of connecting zones, and trade-offs with other design features, that cannot be distilled down to a set of simple selection rules.
The main utility of reserve planning software is to support learning about a given system. By running a series of planning scenarios with different combinations of inputs, insights can be gained into design options and the trade-offs that exist among design attributes. A useful starting point is a base scenario that includes only coarse-filter elements. Other elements and design options can then be added systematically, so that their specific influence on the design can be understood. Case Study 6 provides a working example.
Selecting the Optimal Design
Selecting the best reserve design means determining the optimal balance among competing design attributes. There are several trade-offs that need to be considered.
A commonly encountered trade-off involves the representation of focal species versus coarse-filter elements. The more we skew a design in favour of a small set of focal species, the less effective the design will be for protecting overall biodiversity. Underlying this trade-off is a deep question about the purpose of conservation, which we touched on in our discussion of conservation triage in Chapter 6. Do we value all species equally, in which case the coarse filter would be preferred? Or do some species matter more than others, in which case preference would be given to focal species? This is not a question that can be answered through science. It is a matter of social choice and requires input from stakeholders and the public.
There is also a trade-off between representation and functional effectiveness (Rothley 2006). The longer the list of conservation elements to be represented, the less design flexibility there is for achieving functional objectives. Moreover, when many features must be represented, reserve designs become unavoidably fragmented. The maintenance of ecological processes favours reserve systems comprised of large, well-connected sites (Leroux et al. 2007).
It follows that restraint should be exercised when defining ecosystem components under the coarse-filter approach. Just because detailed spatial datasets have become widely available does not mean that representation targets should be set for ever-finer ecosystem elements. The conservation benefit of fine-scale representation is unlikely to offset the resulting loss of design flexibility and reserve fragmentation. Designs that feature many small reserves also carry a high administrative burden.
Another trade-off involves past and future human disturbances. Undisturbed areas are generally preferred because they provide the best starting point for maintaining ecological function. But habitats facing a high risk of future degradation are most in need of protection (Noss 2000). In practice, these two objectives tend to conflict. Intact landscapes are most often found in areas of low economic potential, with an implied low level of threat (Pearson 2010). Conversely, areas with high economic potential, representing a high level of threat, are often highly disturbed.
Finally, there are trade-offs between conservation objectives and resource development objectives (Naidoo et al. 2006). In the past, these trade-offs were often ignored by conservation planners. But experience has shown that conservation designs that ignore socio-economic trade-offs are unlikely to be implemented (Knight et al. 2008). And designs that are not implemented protect nothing. There is, of course, no guarantee that workable design solutions can be found. Nevertheless, it is worth looking because even partial solutions can be helpful.
The exact nature of the trade-offs will depend on local circumstances and there are no generic rules to specify what should be done. Nor does reserve planning software provide the answers—its role is to provide insight into the trade-offs and options that exist (Sarkar et al. 2006). It falls to the planning team to assess the options and to identify a design that best achieves the conservation priorities for the planning area.
Box 8.3. Summary of Reserve Design Trade-Offs
Reserve design is an exercise in optimization across multiple dimensions. The competing objectives generally do not present as binary choices, but as matters of degree (i.e., more of one implies less of the other). In most cases, conflicts are greatest when the amount of land available for protection is highly constrained.
1. Biodiversity vs. development. Conflicts between habitat protection and industrial development are almost always present. The level of conflict will vary across the landscape because conservation value and resource potential are usually both unevenly distributed.
2. Species vs. species. Species do not all share the same habitat requirements. If a reserve design is biased in favour of a few high-profile species, the habitat of other species may receive less protection.
3. Representation vs. function. Increasing the number of elements to be represented tends to produce increasingly fragmented reserve designs. Conversely, the maintenance of ecological integrity and persistence of biotic elements favour designs with large, well-connected reserves.
4. Intactness vs. vulnerability. Intact areas are preferred candidates for protection because they present the best starting point for maintaining ecological function. However, the need for protection may be highest in disturbed areas, where vulnerability to further degradation is usually greatest.
5. Potential for success vs. need. The paradox of protection is that protected areas are easiest to establish in areas where they are least needed. Limiting protection to low-conflict areas is likely to leave important conservation values unrepresented.
6. Today vs. tomorrow. Because the climate is changing and species distributions are no longer static, protection objectives for current and future periods may be in conflict (see Chapter 9).
